
Ficheiro:Universal joint - output angle relative to input angle.png
Dimensões desta antevisão: 800 × 553 píxeis. Outras resoluções: 320 × 221 píxeis | 640 × 443 píxeis | 804 × 556 píxeis.
Imagem numa resolução maior (804 × 556 píxeis, tamanho: 11 kB, tipo MIME: image/png)
|
|
Esta imagem provém do Wikimedia Commons, um acervo de conteúdo livre da Wikimedia Foundation que pode ser utilizado por outros projetos.
|
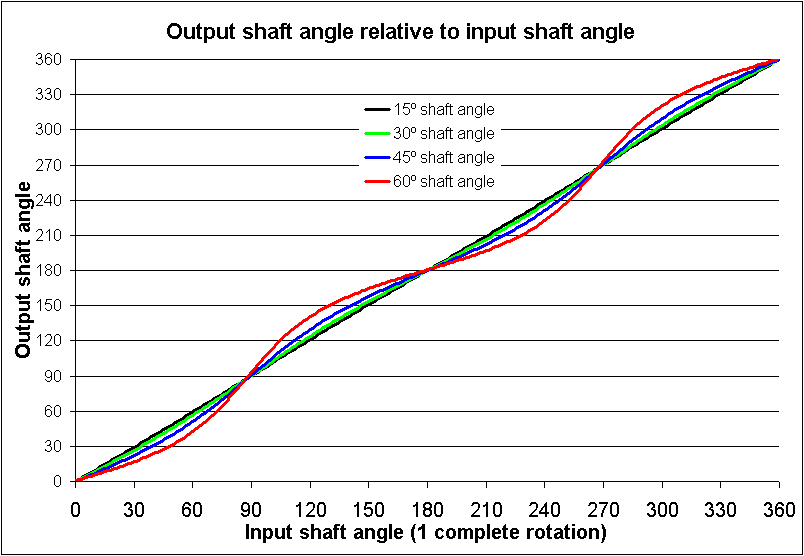
| Descrição |
Equation used:Summation of ω2 for ω1 1 till 360 Where: |
||
| Data | 28 de agosto de 2006 (data de carregamento original) | ||
| Origem | Original uploader was Van helsing at en.wikipedia | ||
| Autor | Van helsing | ||
| Permissão (Reutilizar este ficheiro) |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}

|
Esta imagem de gráficos (ou todas as imagens neste artigo ou categoria) deveriam ser recriadas usando gráficos vectoriais, como ficheiros SVG. Isto tem várias vantagens; veja as Commons:Media for cleanup|imagens para rever para mais informações. Se já criou um ficheiro SVG desta imagem, por favor, carregue-o. Depois do novo ficheiro SVG ter sido carregado, substitua aqui esta predefinição pela predefinição {{vector version available|nome da nova imagem.svg}}.
|
Histórico do ficheiro
Clique uma data e hora para ver o ficheiro tal como ele se encontrava nessa altura.
| Data e hora | Miniatura | Dimensões | Utilizador | Comentário | |
|---|---|---|---|---|---|
| atual | 08h22min de 26 de março de 2007 | | 804 × 556 (11 kB) | Liftarn | {{Information |Description=== Equation used: == Summation of ω<sub>2</sub> for ω<sub>1</sub> 1 till 360 :<math>\omega_2 = \frac{\omega_1\cos\beta}{1-\sin^2\beta\sin^2\phi_1}</math> Where: <br> ω<sub>2</sub> is the speed of the output shaft <br> ω<sub> |
Utilização local do ficheiro
A seguinte página usa este ficheiro:
Utilização global do ficheiro
As seguintes wikis usam este ficheiro:
- en.wikipedia.org
- no.wikipedia.org
{kind=link}