Os números inteiros são constituídos dos números naturais e seus simétricos negativos, podendo ou não incluir o zero. O conjunto de todos os números inteiros é representado pela letra
Z
{\displaystyle \mathbb {Z} }
Zahl ).
Z
=
[
.
.
.
−
3
,
−
2
,
−
1
,
1
,
2
,
3...
]
{\displaystyle \mathbb {Z} =[...-3,-2,-1,1,2,3...]}
Z
∗
=
{\displaystyle \mathbb {Z} ^{*}=}
=
Z
−
[
0
]
{\displaystyle =\mathbb {Z} -[0]}
Z
{\displaystyle \mathbb {Z} }
+
=
{\displaystyle =}
=
[
0
,
1
,
2
,
3...
]
{\displaystyle =[0,1,2,3...]}
Z
∗
{\displaystyle \mathbb {Z} ^{*}}
+
=
{\displaystyle =}
=
[
1
,
2
,
3...
]
{\displaystyle =[1,2,3...]}
Z
{\displaystyle \mathbb {Z} }
-
=
{\displaystyle =}
=
[
.
.
.
−
3
,
−
2
,
−
1
,
0
]
{\displaystyle =[...-3,-2,-1,0]}
Z
∗
{\displaystyle \mathbb {Z} ^{*}}
-
=
{\displaystyle =}
=
[
.
.
.
−
3
,
−
2
,
−
1
]
{\displaystyle =[...-3,-2,-1]}
+
{\displaystyle +}
⋅
{\displaystyle \cdot }
[ 1] [ editar | editar código-fonte ] Há diversos campos numéricos verificando as propriedades abaixo. Dizemos que eles têm uma mesma estrutura algébrica, a qual é chamada de anel de integridade . O campo dos inteiros,
[
Z
,
+
,
⋅
]
{\displaystyle [\mathbb {Z} ,+,\cdot ]}
Para todos
a
,
b
,
c
∈
Z
{\displaystyle a,b,c\in \mathbb {Z} }
a
+
b
∈
Z
{\displaystyle a+b\in \mathbb {Z} }
{\displaystyle \qquad }
+
{\displaystyle +}
a
⋅
b
∈
Z
{\displaystyle a\cdot b\in \mathbb {Z} }
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
a
+
(
b
+
c
)
=
(
a
+
b
)
+
c
{\displaystyle a+(b+c)=(a+b)+c}
{\displaystyle \qquad \qquad }
+
{\displaystyle +}
a
⋅
(
b
⋅
c
)
=
(
a
⋅
b
)
⋅
c
{\displaystyle a\cdot (b\cdot c)=(a\cdot b)\cdot c}
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
a
+
0
=
a
{\displaystyle a+0=a}
{\displaystyle \qquad \qquad }
+
{\displaystyle +}
a
⋅
1
=
a
{\displaystyle a\cdot 1=a}
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
a
+
b
=
b
+
a
{\displaystyle a+b=b+a}
{\displaystyle \qquad \qquad }
+
{\displaystyle +}
a
⋅
b
=
b
⋅
a
{\displaystyle a\cdot b=b\cdot a}
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
∃
a
′
∈
Z
{\displaystyle \exists a'\in \mathbb {Z} }
a
+
a
′
=
0
{\displaystyle a+a'=0}
{\displaystyle \qquad \qquad }
a
′
{\displaystyle a'}
a
{\displaystyle a}
a
⋅
(
b
+
c
)
=
(
a
⋅
b
)
+
(
a
⋅
c
)
{\displaystyle a\cdot (b+c)=(a\cdot b)+(a\cdot c)}
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
a
⋅
b
=
0
⇒
{\displaystyle a\cdot b=0\Rightarrow }
a
=
0
{\displaystyle a=0}
b
=
0
{\displaystyle b=0}
{\displaystyle \qquad \qquad }
⋅
{\displaystyle \cdot }
i
)
{\displaystyle i)}
Unicidade do elemento neutro da multiplicação
Vamos supor por absurdo que existem dois elementos neutros da multiplicação
1
{\displaystyle 1}
1
′
{\displaystyle 1'}
1
≠
1
′
{\displaystyle 1\neq 1'}
Como
1
{\displaystyle 1}
1
′
⋅
1
=
1
′
{\displaystyle 1'\cdot 1=1'}
Como
1
′
{\displaystyle 1'}
1
⋅
1
′
=
1
{\displaystyle 1\cdot 1'=1}
Temos:
1
′
=
1
′
⋅
1
=
1
⋅
1
′
=
1
{\displaystyle 1'=1'\cdot 1=1\cdot 1'=1}
⇒
1
′
=
1
{\displaystyle \qquad \quad \Rightarrow 1'=1}
Pois
1
′
{\displaystyle 1'}
1
{\displaystyle 1}
Então o elemento neutro da multiplicação é único.
i
i
)
{\displaystyle ii)}
Unicidade do elemento simétrico
Vamos supor que existem dois simétricos
a
′
{\displaystyle a'}
a
″
{\displaystyle a''}
a
{\displaystyle a}
a
′
≠
a
″
{\displaystyle a'\neq a''}
a
′
=
0
+
a
′
{\displaystyle a'=0+a'}
=
(
a
+
a
″
)
+
a
′
{\displaystyle \quad =(a+a'')+a'}
=
a
+
(
a
″
+
a
′
)
{\displaystyle \quad =a+(a''+a')}
=
a
+
(
a
′
+
a
″
)
{\displaystyle \quad =a+(a'+a'')}
=
(
a
+
a
′
)
+
a
″
{\displaystyle \quad =(a+a')+a''}
=
0
+
a
″
=
a
″
{\displaystyle \quad =0+a''=a''}
Notação para o simétrico de
a
{\displaystyle a}
−
a
{\displaystyle -a}
Como por hipótese
a
′
≠
a
″
{\displaystyle a'\neq a''}
a
′
=
a
″
{\displaystyle a'=a''}
Logo o simétrico da adição é único.
Com isso podemos definir a subtração:
a
+
b
′
=
a
+
(
−
b
)
=
a
−
b
{\displaystyle \qquad a+b'=a+(-b)=a-b}
i
i
i
)
{\displaystyle iii)}
Multiplicação por
0
{\displaystyle 0}
0
⋅
a
=
0
{\displaystyle \qquad 0\cdot a=0}
∀
a
∈
Z
{\displaystyle \forall a\in \mathbb {Z} }
⇒
0
⋅
a
=
(
b
−
b
)
a
{\displaystyle \qquad \Rightarrow 0\cdot a=(b-b)a}
⇒
0
⋅
a
=
a
b
−
a
b
{\displaystyle \qquad \Rightarrow 0\cdot a=ab-ab}
⇒
0
⋅
a
=
0
{\displaystyle \qquad \Rightarrow 0\cdot a=0}
i
v
)
{\displaystyle iv)}
Distributividade
(
b
+
c
)
a
=
b
a
+
c
a
{\displaystyle (b+c)a=ba+ca}
(
b
+
c
)
a
=
a
(
b
+
c
)
{\displaystyle (b+c)a=a(b+c)}
⇒
a
b
+
a
c
=
b
a
+
c
a
{\displaystyle \Rightarrow ab+ac=ba+ca}
i
)
{\displaystyle i)}
a
{\displaystyle a}
b
{\displaystyle b}
a
+
c
=
b
+
c
⇒
a
=
b
,
{\displaystyle \qquad a+c=b+c\Rightarrow a=b,}
∀
c
∈
Z
{\displaystyle \forall c\in \mathbb {Z} }
Observe que, para
x
=
y
,
{\displaystyle x=y,}
x
,
y
∈
Z
{\displaystyle \quad x,y\in \mathbb {Z} }
z
∈
Z
{\displaystyle z\in \mathbb {Z} }
Logo temos,
x
+
z
=
y
+
z
{\displaystyle x+z=y+z}
N
{\displaystyle \mathbb {N} }
Agora podemos provar:
a
+
c
=
b
+
c
{\displaystyle \qquad a+c=b+c}
⇒
(
a
+
c
)
+
(
−
c
)
=
(
b
+
c
)
+
(
−
c
)
{\displaystyle \qquad \Rightarrow (a+c)+(-c)=(b+c)+(-c)}
⇒
a
+
(
c
−
c
)
=
b
+
(
c
−
c
)
{\displaystyle \qquad \Rightarrow a+(c-c)=b+(c-c)}
⇒
a
+
0
=
b
+
0
{\displaystyle \qquad \Rightarrow a+0=b+0}
⇒
a
=
b
{\displaystyle \qquad \Rightarrow a=b}
i
i
)
{\displaystyle ii)}
a
,
b
{\displaystyle a,b}
c
{\displaystyle c}
a
⋅
c
=
b
⋅
c
⇒
a
=
b
,
{\displaystyle \qquad a\cdot c=b\cdot c\Rightarrow a=b,}
∀
c
≠
0
{\displaystyle \forall c\neq 0}
⇒
a
c
−
b
c
=
b
c
−
b
c
{\displaystyle \qquad \Rightarrow ac-bc=bc-bc}
⇒
c
a
−
c
b
=
0
{\displaystyle \qquad \Rightarrow ca-cb=0}
⇒
c
(
a
−
b
)
=
0
{\displaystyle \qquad \Rightarrow c(a-b)=0}
Logo
c
=
0
{\displaystyle c=0}
a
−
b
=
0
{\displaystyle a-b=0}
c
≠
0
{\displaystyle c\neq 0}
a
−
b
=
0
{\displaystyle \qquad a-b=0}
⇒
a
−
b
+
b
=
0
+
b
{\displaystyle \qquad \Rightarrow a-b+b=0+b}
a
+
0
=
0
+
b
{\displaystyle \qquad a+0=0+b}
a
=
b
{\displaystyle \qquad a=b}
Temos que se
a
>
b
{\displaystyle a>b}
b
<
a
{\displaystyle b<a}
a
−
b
>
0
{\displaystyle a-b>0}
Com isso os números inteiros ficam divididos em:
Z
+
=
{
0
,
1
,
2
,
3...
}
⇒
{\displaystyle \mathbb {Z} ^{+}=\{0,1,2,3...\}\Rightarrow }
Inteiros não negativos
x
∈
Z
:
x
≥
0
{\displaystyle \qquad x\in \mathbb {Z} :x\geq 0}
Z
−
=
{
.
.
.
,
−
3
,
−
2
,
−
1
,
0
}
⇒
{\displaystyle \mathbb {Z} ^{-}=\{...,-3,-2,-1,0\}\Rightarrow }
Inteiros não positivos
x
∈
Z
:
x
≤
0
{\displaystyle \qquad x\in \mathbb {Z} :x\leq 0}
Z
∗
+
=
{
1
,
2
,
3
,
.
.
.
}
⇒
{\displaystyle \mathbb {Z} _{*}^{+}=\{1,2,3,...\}\Rightarrow }
Inteiros positivos
x
∈
Z
:
x
>
0
{\displaystyle \qquad x\in \mathbb {Z} :x>0}
Z
∗
−
=
{
.
.
.
,
−
3
,
−
2
,
−
1
}
⇒
{\displaystyle \mathbb {Z} _{*}^{-}=\{...,-3,-2,-1\}\Rightarrow }
Inteiros negativos
x
∈
Z
:
x
<
0
{\displaystyle \qquad x\in \mathbb {Z} :x<0}
Observação: temos
a
>
b
⇒
a
−
b
>
0
,
{\displaystyle a>b\Rightarrow a-b>0,}
a
−
0
=
a
{\displaystyle a-0=a}
a
>
0
{\displaystyle a>0}
a
∈
{
1
,
2
,
3
,
.
.
.
}
{\displaystyle a\in \{1,2,3,...\}}
Notação:
{
a
≥
b
(
a
>
b
o
u
a
=
b
)
a
≤
b
(
a
<
b
o
u
a
=
b
)
{\displaystyle {\begin{cases}a\geq b(a>b\quad ou\quad a=b)\\a\leq b(a<b\quad ou\quad a=b)\\\end{cases}}}
As relações
<
{\displaystyle <}
≤
{\displaystyle \leq }
Proposição:
Sendo
a
,
b
,
c
∈
Z
{\displaystyle a,b,c\in \mathbb {Z} }
i
)
{\displaystyle i)}
∗
a
<
b
⇔
a
+
c
<
b
+
c
,
∀
c
∈
Z
{\displaystyle *\quad a<b\Leftrightarrow a+c<b+c,\quad \forall c\in \mathbb {Z} }
a
<
b
⇒
b
−
a
>
0
{\displaystyle a<b\Rightarrow b-a>0}
⇒
b
−
a
+
c
−
c
>
0
{\displaystyle \qquad \Rightarrow b-a+c-c>0}
⇒
b
+
c
−
a
−
c
>
0
{\displaystyle \qquad \Rightarrow b+c-a-c>0}
⇒
(
b
+
c
)
−
(
a
+
c
)
>
0
{\displaystyle \qquad \Rightarrow (b+c)-(a+c)>0}
⇒
a
+
c
<
b
+
c
{\displaystyle \qquad \Rightarrow a+c<b+c}
a
+
c
<
b
+
c
⇒
a
<
b
{\displaystyle a+c<b+c\Rightarrow a<b}
⇒
(
b
+
c
)
−
(
a
+
c
)
>
0
{\displaystyle \qquad \qquad \quad \Rightarrow (b+c)-(a+c)>0}
⇒
b
+
c
−
a
−
c
>
0
{\displaystyle \qquad \qquad \quad \Rightarrow b+c-a-c>0}
⇒
(
b
−
a
)
+
(
c
−
c
)
>
0
{\displaystyle \qquad \qquad \quad \Rightarrow (b-a)+(c-c)>0}
⇒
b
−
a
>
0
{\displaystyle \qquad \qquad \quad \Rightarrow b-a>0}
⇒
a
<
b
{\displaystyle \qquad \qquad \quad \Rightarrow a<b}
∗
a
≤
b
⇔
a
+
c
≤
b
+
c
,
∀
c
∈
Z
{\displaystyle *\quad a\leq b\Leftrightarrow a+c\leq b+c,\quad \forall c\in \mathbb {Z} }
Esta demonstração é de forma análoga à anterior.
i
i
)
{\displaystyle ii)}
∗
a
<
b
⇔
a
⋅
c
<
b
⋅
c
,
∀
c
∈
Z
{\displaystyle *\quad a<b\Leftrightarrow a\cdot c<b\cdot c,\quad \forall c\in \mathbb {Z} }
Observe que quando
n
>
0
{\displaystyle n>0}
3
n
>
2
n
>
n
>
0
{\displaystyle 3n>2n>n>0}
c
n
>
0
{\displaystyle cn>0}
c
>
0
{\displaystyle c>0}
a
<
b
⇒
b
−
a
>
0
{\displaystyle a<b\Rightarrow b-a>0}
⇒
c
(
b
−
a
)
>
0
c
>
0
{\displaystyle \qquad \Rightarrow c(b-a)>0\quad \qquad c>0}
⇒
c
b
−
c
a
>
0
{\displaystyle \qquad \Rightarrow cb-ca>0}
⇒
c
a
<
c
b
{\displaystyle \qquad \Rightarrow ca<cb}
c
a
<
c
b
⇒
a
<
b
{\displaystyle ca<cb\Rightarrow a<b}
⇒
c
a
−
c
b
>
0
{\displaystyle \qquad \quad \Rightarrow ca-cb>0}
⇒
c
(
b
−
a
)
>
0
c
>
0
{\displaystyle \qquad \quad \Rightarrow c(b-a)>0\quad \qquad c>0}
⇒
b
−
a
>
0
{\displaystyle \qquad \quad \Rightarrow b-a>0}
⇒
a
<
b
{\displaystyle \qquad \quad \Rightarrow a<b}
Observe que quando
n
>
0
{\displaystyle n>0}
−
3
n
<
−
2
n
<
−
n
<
0
{\displaystyle -3n<-2n<-n<0}
c
n
<
0
{\displaystyle cn<0}
c
<
0
{\displaystyle c<0}
a
<
b
⇒
b
−
a
>
0
{\displaystyle a<b\Rightarrow b-a>0}
⇒
c
(
b
−
a
)
<
0
c
<
0
{\displaystyle \qquad \Rightarrow c(b-a)<0\quad \qquad c<0}
⇒
c
b
−
c
a
<
0
{\displaystyle \qquad \Rightarrow cb-ca<0}
⇒
c
b
<
c
a
{\displaystyle \qquad \Rightarrow cb<ca}
a
<
b
⇒
c
a
>
c
b
{\displaystyle a<b\Rightarrow ca>cb}
⇒
c
b
−
c
a
<
0
{\displaystyle \qquad \Rightarrow cb-ca<0}
⇒
c
(
b
−
a
)
<
0
c
<
0
{\displaystyle \qquad \Rightarrow c(b-a)<0\quad \qquad c<0}
⇒
b
−
a
>
0
{\displaystyle \qquad \Rightarrow b-a>0}
⇒
a
<
b
{\displaystyle \qquad \Rightarrow a<b}
O valor absoluto de um número inteiro
b
{\displaystyle b}
|
b
|
=
{
b
s
e
b
≥
0
−
b
s
e
b
<
0
{\displaystyle |b|={\begin{cases}b\ se\ b\geq 0\\-b\ se\ b<0\\\end{cases}}}
Tomar o valor absoluto de um número inteiro consiste basicamente em deixá-lo inalterado se o número for positivo ou nulo, e apagar seu sinal, caso ele seja negativo.
Exemplo:
|
−
2
|
=
2
=
|
2
|
{\displaystyle |-2|=2=|2|}
|
0
|
=
0
{\displaystyle |0|=0}
O divisor de um número inteiro
a
{\displaystyle a}
b
{\displaystyle b}
a
{\displaystyle a}
a
=
b
.
c
{\displaystyle a=b.c}
c
{\displaystyle c}
Sempre que
b
{\displaystyle b}
a
{\displaystyle a}
{\displaystyle \qquad }
b
{\displaystyle b}
a
{\displaystyle a}
b
|
a
{\displaystyle b|a}
{\displaystyle \qquad }
a
{\displaystyle a}
b
{\displaystyle b}
Exemplo:
Os divisores de
a
=
4
{\displaystyle a=4}
b
=
−
2
,
−
1
,
1
,
2
{\displaystyle b=-2,-1,1,2}
Todos eles são não-nulos, e temos respectivamente:
4
=
(
−
2
)
⋅
(
−
2
)
,
4
=
(
−
1
)
⋅
(
−
4
)
,
4
=
1
⋅
4
,
4
=
2
⋅
2
{\displaystyle 4=(-2)\cdot (-2),\quad 4=(-1)\cdot (-4),\quad 4=1\cdot 4,\quad 4=2\cdot 2}
Atenção:
zero só é divisor dele mesmo;
todos os inteiros são divisores de zero.
i
)
{\displaystyle i)}
b
{\displaystyle b}
a
{\displaystyle a}
−
b
{\displaystyle -b}
Hipótese:
b
∣
a
⇒
a
=
b
⋅
c
c
∈
Z
{\displaystyle b\mid a\Rightarrow a=b\cdot c\qquad c\in \mathbb {Z} }
Tese:
−
b
∣
a
⇒
a
=
−
b
⋅
d
d
∈
Z
{\displaystyle -b\mid a\Rightarrow a=-b\cdot d\qquad d\in \mathbb {Z} }
Temos que
a
=
b
⋅
c
{\displaystyle a=b\cdot c}
Então
(
−
1
)
a
=
b
⋅
c
(
−
1
)
{\displaystyle (-1)a=b\cdot c(-1)}
⇒
(
−
1
)
−
a
=
(
−
1
)
b
⋅
(
−
c
)
{\displaystyle \Rightarrow (-1)-a=(-1)b\cdot (-c)}
⇒
a
=
(
−
b
)
⋅
(
−
c
)
{\displaystyle \Rightarrow a=(-b)\cdot (-c)}
d
=
−
c
{\displaystyle d=-c}
⇒
a
=
−
b
.
d
{\displaystyle \Rightarrow a=-b.d}
⇒
−
b
∣
a
{\displaystyle \Rightarrow -b\mid a}
i
i
)
{\displaystyle ii)}
a
{\displaystyle a}
b
{\displaystyle b}
b
{\displaystyle b}
a
{\displaystyle a}
a
=
b
{\displaystyle a=b}
Hipótese:
a
∣
b
{\displaystyle a\mid b}
b
∣
a
{\displaystyle b\mid a}
Tese:
a
=
b
{\displaystyle a=b}
Temos que
a
∣
b
⇒
b
=
a
⋅
c
{\displaystyle a\mid b\Rightarrow b=a\cdot c}
c
∈
Z
{\displaystyle \qquad c\in \mathbb {Z} }
b
∣
a
⇒
a
=
b
⋅
d
{\displaystyle \qquad \qquad b\mid a\Rightarrow a=b\cdot d}
d
∈
Z
{\displaystyle \qquad d\in \mathbb {Z} }
⇒
b
=
(
b
⋅
d
)
⋅
c
⇒
d
⋅
c
=
1
{\displaystyle \Rightarrow b=(b\cdot d)\cdot c\Rightarrow d\cdot c=1}
⇒
d
=
c
=
1
{\displaystyle \Rightarrow d=c=1}
d
=
c
=
−
1
{\displaystyle d=c=-1}
Para
d
=
c
=
1
{\displaystyle d=c=1}
a
=
b
⋅
d
⇒
a
=
b
⋅
1
⇒
a
=
b
{\displaystyle a=b\cdot d\Rightarrow a=b\cdot 1\Rightarrow a=b}
b
=
a
.
c
⇒
b
=
a
⋅
1
⇒
b
=
a
{\displaystyle b=a.c\Rightarrow b=a\cdot 1\Rightarrow b=a}
Para
d
=
c
=
−
1
{\displaystyle d=c=-1}
a
=
b
⋅
d
⇒
a
=
b
⋅
(
−
1
)
⇒
a
=
−
b
{\displaystyle a=b\cdot d\Rightarrow a=b\cdot (-1)\Rightarrow a=-b}
b
=
a
.
c
⇒
b
=
a
⋅
(
−
1
)
⇒
b
=
−
a
{\displaystyle b=a.c\Rightarrow b=a\cdot (-1)\Rightarrow b=-a}
⇒
b
=
−
(
−
b
)
{\displaystyle \Rightarrow b=-(-b)}
⇒
b
=
b
{\displaystyle \Rightarrow b=b}
Como
1
,
−
1
,
a
,
−
a
{\displaystyle 1,-1,a,-a}
a
≠
0
{\displaystyle a\neq 0}
divisores triviais, ou os divisores impróprios, de
a
{\displaystyle a}
Nos casos em que
a
=
1
{\displaystyle a=1}
a
=
−
1
{\displaystyle a=-1}
a
≠
0
{\displaystyle a\neq 0}
Número primo é todo inteiro
p
≠
0
,
±
1
{\displaystyle p\neq 0,\pm 1}
p
{\displaystyle p}
p
,
−
p
,
1
,
−
1
{\displaystyle p,-p,1,-1}
Número composto é todo inteiro
k
≠
0
{\displaystyle k\neq 0}
k
≠
0
{\displaystyle k\neq 0}
Chamamos de divisor comum de dois ou mais números inteiros, todo inteiro que seja divisor de cada um desses inteiros.
Exemplo:
Os divisores de
8
{\displaystyle 8}
±
1
,
±
2
,
±
4
,
±
8
{\displaystyle \pm 1,\pm 2,\pm 4,\pm 8}
12
{\displaystyle 12}
±
1
,
±
2
,
±
3
,
±
4
,
±
6
,
±
12
{\displaystyle \pm 1,\pm 2,\pm 3,\pm 4,\pm 6,\pm 12}
8
{\displaystyle 8}
12
{\displaystyle 12}
±
1
,
±
2
,
±
4
{\displaystyle \pm 1,\pm 2,\pm 4}
Dizemos que dois números inteiros são relativamente primos, ou primos entre si se tiverem como divisores comuns apenas os divisores triviais
+
1
{\displaystyle +1}
−
1
{\displaystyle -1}
Proposição: todo número primo que não dividir um inteiro
a
{\displaystyle a}
a
{\displaystyle a}
p
{\displaystyle p}
a
{\displaystyle a}
p
{\displaystyle p}
1
{\displaystyle 1}
−
1
{\displaystyle -1}
p
{\displaystyle p}
−
p
{\displaystyle -p}
p
{\displaystyle p}
a
{\displaystyle a}
1
{\displaystyle 1}
−
1
{\displaystyle -1}
Chamamos de máximo divisor comum de dois ou mais números inteiros, o maior dos divisores comuns desses inteiros. A notação
m
d
c
(
a
,
b
)
{\displaystyle mdc(a,b)}
a
{\displaystyle a}
b
{\displaystyle b}
Exemplo:
Temos
m
d
c
(
6
,
9
)
=
3
{\displaystyle mdc(6,9)=3}
6
{\displaystyle 6}
9
{\displaystyle 9}
±
1
{\displaystyle \pm 1}
±
3
{\displaystyle \pm 3}
Note que:
o
m
d
c
(
a
,
b
)
{\displaystyle mdc(a,b)}
a
=
b
=
0
{\displaystyle a=b=0}
m
d
c
(
0
,
b
)
=
{
(
b
)
,
s
e
b
≠
0
∄
s
e
b
=
0
}
{\displaystyle mdc(0,b)={\begin{Bmatrix}(b),se\quad b\neq 0\\\nexists \quad se\quad b=0\end{Bmatrix}}}
o conjunto de divisores comuns de qualquer conjunto de dois ou mais números inteiros nunca é vazio (pois
±
1
{\displaystyle \pm 1}
c
≠
0
{\displaystyle c\neq 0}
c
{\displaystyle c}
−
c
{\displaystyle -c}
o
m
d
c
(
a
,
b
)
≥
1
{\displaystyle mdc(a,b)\geq 1}
m
d
c
(
a
,
b
)
=
m
d
c
(
−
a
,
b
)
=
m
d
c
(
a
,
−
b
)
=
m
d
c
(
−
a
,
−
b
)
{\displaystyle mdc(a,b)=mdc(-a,b)=mdc(a,-b)=mdc(-a,-b)}
Dizer que dois números
a
{\displaystyle a}
b
{\displaystyle b}
m
d
c
(
a
,
b
)
=
1
{\displaystyle mdc(a,b)=1}
→
{\displaystyle \rightarrow }
Fatoração: sendo
a
=
b
1
,
b
2
.
.
.
b
n
{\displaystyle a=b_{1},b_{2}...b_{n}}
a
,
b
1
,
b
2
.
.
.
b
n
{\displaystyle a,b_{1},b_{2}...b_{n}}
b
1
,
b
2
.
.
.
b
n
{\displaystyle b_{1},b_{2}...b_{n}}
a
{\displaystyle a}
b
1
,
b
2
.
.
.
b
n
{\displaystyle b_{1},b_{2}...b_{n}}
a
{\displaystyle a}
Ex:
18
=
2
⋅
9
=
3
⋅
6
=
1
⋅
18
=
2
⋅
3
⋅
3
{\displaystyle 18=2\cdot 9=3\cdot 6=1\cdot 18=2\cdot 3\cdot 3}
A ideia da divisão euclidiana consiste em separar um todo em partes iguais. Essa divisão pode ocorrer de forma exata (quando a união dessas partes resulta no número original) ou de forma inexata (quando ocorre o contrário). No contexto dos números inteiros,
a
{\displaystyle a}
b
{\displaystyle b}
A divisão exata de
a
{\displaystyle a}
b
{\displaystyle b}
q
{\displaystyle q}
a
=
q
⋅
b
{\displaystyle a=q\cdot b}
{\displaystyle \qquad }
4
=
2
⋅
2
{\displaystyle \qquad \qquad 4=2\cdot 2}
10
=
2
⋅
5
{\displaystyle \qquad \qquad 10=2\cdot 5}
A divisão inexata de
a
{\displaystyle a}
b
{\displaystyle b}
q
{\displaystyle q}
a
=
q
⋅
b
+
r
{\displaystyle a=q\cdot b+r}
r
{\displaystyle r}
b
{\displaystyle b}
{\displaystyle \qquad }
26
=
2
⋅
9
+
8
{\displaystyle \qquad \qquad 26=2\cdot 9+8}
21
=
4
⋅
5
+
1
{\displaystyle \qquad \qquad 21=4\cdot 5+1}
Há apenas uma maneira de fazer uma divisão exata, mas há maneiras diferentes de se fazer uma divisão inexata. Podemos dividí-las em: inexatas por falta (como
17
=
3
⋅
5
+
2
{\displaystyle 17=3\cdot 5+2}
17
=
4
⋅
5
+
(
−
3
)
{\displaystyle 17=4\cdot 5+(-3)}
Este teorema afirma que os números primos funcionam como base para a construção de todo e qualquer número inteiro (exceto
0
{\displaystyle 0}
±
1
{\displaystyle \pm 1}
A fatoração em primos de um inteiro
a
≠
0
{\displaystyle a\neq 0}
±
1
{\displaystyle \pm 1}
Existem primos
p
1
,
p
2
,
p
3
,
.
.
.
,
{\displaystyle p_{1},p_{2},p_{3},...,}
a
=
±
p
1
⋅
p
2
⋅
p
3
.
.
.
{\displaystyle a=\pm p_{1}\cdot p_{2}\cdot p_{3}...}
Existem primos
p
1
≤
p
2
≤
p
3
≤
.
.
.
≤
p
n
{\displaystyle p_{1}\leq p_{2}\leq p_{3}\leq ...\leq p_{n}}
a
=
±
p
1
⋅
p
2
⋅
p
3
⋅
.
.
.
⋅
p
n
{\displaystyle a=\pm p_{1}\cdot p_{2}\cdot p_{3}\cdot ...\cdot p_{n}}
Existem primos distintos
p
1
<
p
2
<
p
3
,
.
.
.
<
p
n
{\displaystyle p_{1}<p_{2}<p_{3},...<p_{n}}
j
1
,
j
2
,
j
3
,
.
.
.
,
j
n
{\displaystyle j_{1},j_{2},j_{3},...,j_{n}}
a
=
±
p
1
j
1
⋅
p
2
j
2
⋅
p
3
j
3
⋅
.
.
.
⋅
p
n
j
n
{\displaystyle a=\pm p_{1}^{j_{1}}\cdot p_{2}^{j_{2}}\cdot p_{3}^{j_{3}}\cdot ...\cdot p_{n}^{j_{n}}}
Assim, por exemplo,
−
40
=
−
2
⋅
2
⋅
2
⋅
5
{\displaystyle \qquad \qquad -40=-2\cdot 2\cdot 2\cdot 5}
−
40
=
−
2
3
⋅
5
{\displaystyle \qquad \qquad -40=-2^{3}\cdot 5}
63
=
3
⋅
3
⋅
7
{\displaystyle \qquad \qquad 63=3\cdot 3\cdot 7}
63
=
3
2
⋅
7
{\displaystyle \qquad \qquad 63=3^{2}\cdot 7}
Na representação trigonométrica, um número complexo
z
=
a
+
i
b
{\displaystyle z=a+ib}
Um vetor é representado por um segmento de reta orientado, e define grandezas que se caracterizam por:
Módulo: Direção: Sentido: Quando
z
=
a
+
i
b
{\displaystyle z=a+ib}
Argumento de
z
{\displaystyle z}
θ
{\displaystyle \theta }
Módulo de
z
{\displaystyle z}
r
=
|
z
|
=
a
2
+
b
2
{\displaystyle r=|z|={\sqrt {a^{2}+b^{2}}}}
O argumento geral de
z
{\displaystyle z}
θ
+
2
π
.
k
{\displaystyle \theta +2\pi .k}
θ
+
k
.360
∘
{\displaystyle \theta +k.360^{\circ }}
argumento principal é o valor de
θ
{\displaystyle \theta }
−
π
<
θ
≤
π
{\displaystyle -\pi <\theta \leq \pi }
−
180
∘
<
θ
≤
180
∘
{\displaystyle -180^{\circ }<\theta \leq 180^{\circ }}
A partir das relações trigonométricas, obtêm-se:
cos
θ
=
a
|
z
|
{\displaystyle \cos \theta ={a \over |z|}}
a
=
|
z
|
.
cos
θ
{\displaystyle a=|z|.\cos \theta }
sen
θ
=
b
|
z
|
{\displaystyle \operatorname {sen} \theta ={b \over |z|}}
b
=
|
z
|
.
sen
θ
{\displaystyle b=|z|.\operatorname {sen} \theta }
Portanto, para o número complexo
z
=
a
+
i
b
{\displaystyle z=a+ib}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
(
|
z
|
.
cos
θ
)
+
i
(
|
z
|
.
sen
θ
)
{\displaystyle z=(|z|.\cos \theta )+i(|z|.\operatorname {sen} \theta )}
Exemplos:
{\displaystyle \quad }
z
{\displaystyle z}
|
z
|
=
1
{\displaystyle |z|=1}
{\displaystyle \quad }
{\displaystyle \quad }
θ
=
0
+
2
π
k
{\displaystyle \theta =0+2\pi k}
|
z
|
=
1
{\displaystyle |z|=1}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
1
{\displaystyle z=1}
z
=
cos
2
π
k
+
i
sen
2
π
k
{\displaystyle z=\cos 2\pi k+i\operatorname {sen} 2\pi k}
k
∈
Z
{\displaystyle k\in \mathbb {Z} }
{\displaystyle \quad }
{\displaystyle \quad }
z
{\displaystyle z}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
1
{\displaystyle z=1}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
2
π
.0
+
i
sen
2
π
.0
{\displaystyle z=\cos 2\pi .0+i\operatorname {sen} 2\pi .0}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
0
+
i
sen
0
{\displaystyle z=\cos 0+i\operatorname {sen} 0}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
2
π
.1
+
i
sen
2
π
.1
{\displaystyle z=\cos 2\pi .1+i\operatorname {sen} 2\pi .1}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
2
π
+
i
sen
2
π
{\displaystyle z=\cos 2\pi +i\operatorname {sen} 2\pi }
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
2
π
.2
+
i
sen
2
π
.2
{\displaystyle z=\cos 2\pi .2+i\operatorname {sen} 2\pi .2}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
4
π
+
i
sen
4
π
{\displaystyle z=\cos 4\pi +i\operatorname {sen} 4\pi }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
z
{\displaystyle z}
|
z
|
=
1
{\displaystyle |z|=1}
{\displaystyle \quad }
{\displaystyle \quad }
θ
=
1
2
π
+
2
π
k
{\displaystyle \theta ={\frac {1}{2}}\pi +2\pi k}
|
z
|
=
1
{\displaystyle |z|=1}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
i
{\displaystyle z=i}
z
=
cos
(
1
2
π
+
2
π
k
)
+
i
sen
(
1
2
π
+
2
π
k
)
{\displaystyle z=\cos({\frac {1}{2}}\pi +2\pi k)+i\operatorname {sen}({\frac {1}{2}}\pi +2\pi k)}
k
∈
Z
{\displaystyle k\in \mathbb {Z} }
{\displaystyle \quad }
{\displaystyle \quad }
z
{\displaystyle z}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
i
{\displaystyle z=i}
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
(
1
2
π
+
2
π
.0
)
+
i
sen
(
1
2
π
+
2
π
.0
)
{\displaystyle z=\cos({\frac {1}{2}}\pi +2\pi .0)+i\operatorname {sen}({\frac {1}{2}}\pi +2\pi .0)}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
1
2
π
+
i
sen
1
2
π
{\displaystyle z=\cos {\frac {1}{2}}\pi +i\operatorname {sen} {\frac {1}{2}}\pi }
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
(
1
2
π
+
2
π
.1
)
+
i
sen
(
1
2
π
+
2
π
.1
)
{\displaystyle z=\cos({\frac {1}{2}}\pi +2\pi .1)+i\operatorname {sen}({\frac {1}{2}}\pi +2\pi .1)}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
5
2
π
+
i
sen
5
2
π
{\displaystyle z=\cos {\frac {5}{2}}\pi +i\operatorname {sen} {\frac {5}{2}}\pi }
{\displaystyle \quad }
{\displaystyle \quad }
z
=
cos
(
1
2
π
+
2
π
.2
)
+
i
sen
(
1
2
π
+
2
π
.2
)
{\displaystyle z=\cos({\frac {1}{2}}\pi +2\pi .2)+i\operatorname {sen}({\frac {1}{2}}\pi +2\pi .2)}
{\displaystyle \quad }
⇒
{\displaystyle \Rightarrow }
{\displaystyle \quad }
z
=
cos
9
2
π
+
i
sen
9
2
π
{\displaystyle z=\cos {\frac {9}{2}}\pi +i\operatorname {sen} {\frac {9}{2}}\pi }
{\displaystyle \qquad }
{\displaystyle \qquad }
Dados dois números complexos
z
=
a
+
i
b
{\displaystyle z=a+ib}
w
=
c
+
i
d
{\displaystyle w=c+id}
{\displaystyle \quad }
z
=
|
z
|
(
cos
(
θ
+
2
π
k
)
+
i
sen
(
θ
+
2
π
k
)
)
{\displaystyle z=|z|(\cos(\theta +2\pi k)+i\operatorname {sen}(\theta +2\pi k))}
{\displaystyle \quad }
w
=
|
w
|
(
cos
(
α
+
2
π
k
)
+
i
sen
(
α
+
2
π
k
)
)
{\displaystyle w=|w|(\cos(\alpha +2\pi k)+i\operatorname {sen}(\alpha +2\pi k))}
{\displaystyle \quad }
z
=
w
{\displaystyle z=w}
{\displaystyle \quad }
⇔
{\displaystyle \Leftrightarrow }
{\displaystyle \quad }
|
z
|
cos
θ
=
|
w
|
cos
α
{\displaystyle |z|\cos \theta =|w|\cos \alpha }
|
z
|
sen
θ
=
|
w
|
sen
α
{\displaystyle |z|\operatorname {sen} \theta =|w|\operatorname {sen} \alpha }
{\displaystyle \quad }
⇔
{\displaystyle \Leftrightarrow }
{\displaystyle \quad }
|
z
|
=
|
w
|
{\displaystyle |z|=|w|}
α
=
θ
+
2
π
k
{\displaystyle \alpha =\theta +2\pi k}
A igualdade exige que
|
z
|
=
|
w
|
{\displaystyle |z|=|w|}
θ
=
α
{\displaystyle \theta =\alpha }
O simétrico de um número complexo
z
=
a
+
i
b
{\displaystyle z=a+ib}
−
z
=
−
(
a
+
i
b
)
{\displaystyle -z=-(a+ib)}
−
z
=
(
−
a
)
+
i
(
−
b
)
{\displaystyle -z=(-a)+i(-b)}
Corresponde a uma rotação de 180° em torno da origem, à partir de
z
{\displaystyle z}
Em notação trigonométrica:
z
=
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle z=|z|(\cos \theta +i\operatorname {sen} \theta )}
(
−
z
)
=
|
z
|
(
cos
(
θ
+
π
)
+
i
sen
(
θ
+
π
)
)
{\displaystyle (-z)=|z|(\cos(\theta +\pi )+i\operatorname {sen}(\theta +\pi ))}
Exemplo:
z
=
1
+
i
=
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
(
cos
π
4
+
i
sen
π
4
)
{\displaystyle z=1+i=|z|(\cos \theta +i\operatorname {sen} \theta )={\sqrt {2}}(\cos {\frac {\pi }{4}}+i\operatorname {sen} {\frac {\pi }{4}})}
(
−
z
)
=
−
1
−
i
=
|
z
|
(
cos
(
θ
+
π
)
+
i
sen
(
θ
+
π
)
)
=
2
(
cos
5
4
π
+
i
sen
5
4
π
)
{\displaystyle (-z)=-1-i=|z|(\cos(\theta +\pi )+i\operatorname {sen}(\theta +\pi ))={\sqrt {2}}(\cos {\frac {5}{4}}\pi +i\operatorname {sen} {\frac {5}{4}}\pi )}
O conjugado de um número complexo
z
=
a
+
i
b
{\displaystyle z=a+ib}
z
¯
=
a
−
i
b
{\displaystyle {\bar {z}}=a-ib}
Corresponde a uma reflexão de
z
{\displaystyle z}
Em notação trigonométrica:
z
=
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle z=|z|(\cos \theta +i\operatorname {sen} \theta )}
z
¯
=
|
z
|
(
cos
(
−
θ
)
+
i
sen
(
−
θ
)
)
{\displaystyle {\bar {z}}=|z|(\cos(-\theta )+i\operatorname {sen}(-\theta ))}
Exemplo:
z
=
1
+
i
=
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
(
cos
π
4
+
i
sen
π
4
)
{\displaystyle z=1+i=|z|(\cos \theta +i\operatorname {sen} \theta )={\sqrt {2}}(\cos {\frac {\pi }{4}}+i\operatorname {sen} {\frac {\pi }{4}})}
z
¯
=
−
1
−
i
=
|
z
|
(
cos
(
−
θ
)
+
i
sen
(
−
θ
)
)
=
2
(
cos
(
−
5
4
)
π
+
i
sen
(
−
5
4
)
π
)
{\displaystyle {\bar {z}}=-1-i=|z|(\cos(-\theta )+i\operatorname {sen}(-\theta ))={\sqrt {2}}(\cos(-{\frac {5}{4}})\pi +i\operatorname {sen}(-{\frac {5}{4}})\pi )}
Seja
z
=
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle z=|z|(\cos \theta +i\operatorname {sen} \theta )}
w
=
|
w
|
(
cos
α
+
i
sen
α
)
{\displaystyle w=|w|(\cos \alpha +i\operatorname {sen} \alpha )}
{\displaystyle \quad }
{\displaystyle \quad }
k
.
z
=
k
.
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle k.z=k.|z|(\cos \theta +i\operatorname {sen} \theta )}
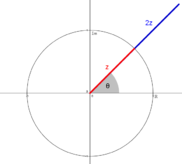
Se
k
>
1
{\displaystyle k>1}
z
{\displaystyle z}
Exemplo:
z
=
1
+
i
=
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
(
cos
45
∘
+
i
sen
45
∘
)
{\displaystyle z=1+i=|z|(\cos \theta +i\operatorname {sen} \theta )={\sqrt {2}}(\cos 45^{\circ }+i\operatorname {sen} 45^{\circ })}
2.
z
=
2
+
2
i
=
2.
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
2
(
cos
45
∘
+
i
sen
45
∘
)
{\displaystyle 2.z=2+2i=2.|z|(\cos \theta +i\operatorname {sen} \theta )=2{\sqrt {2}}(\cos 45^{\circ }+i\operatorname {sen} 45^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
Se
0
<
k
<
1
{\displaystyle 0<k<1}
z
{\displaystyle z}
Exemplo:
z
=
1
+
i
=
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
(
cos
45
∘
+
i
sen
45
∘
)
{\displaystyle z=1+i=|z|(\cos \theta +i\operatorname {sen} \theta )={\sqrt {2}}(\cos 45^{\circ }+i\operatorname {sen} 45^{\circ })}
1
2
.
z
=
1
2
+
1
2
i
=
1
2
.
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
2
(
cos
45
∘
+
i
sen
45
∘
)
{\displaystyle {\frac {1}{2}}.z={\frac {1}{2}}+{\frac {1}{2}}i={\frac {1}{2}}.|z|(\cos \theta +i\operatorname {sen} \theta )={\frac {\sqrt {2}}{2}}(\cos 45^{\circ }+i\operatorname {sen} 45^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
Se
k
<
0
{\displaystyle k<0}
z
{\displaystyle z}
180
∘
{\displaystyle 180^{\circ }}
z
{\displaystyle z}
−
z
{\displaystyle -z}
Exemplo:
z
=
1
+
i
=
|
z
|
(
cos
θ
+
i
sen
θ
)
=
2
(
cos
45
∘
+
i
sen
45
∘
)
{\displaystyle z=1+i=|z|(\cos \theta +i\operatorname {sen} \theta )={\sqrt {2}}(\cos 45^{\circ }+i\operatorname {sen} 45^{\circ })}
(
−
1
)
.
z
=
−
(
1
+
1
i
)
=
|
z
|
(
cos
(
θ
+
180
∘
)
+
i
sen
(
θ
+
180
∘
)
)
=
2
(
cos
225
∘
+
i
sen
225
∘
)
{\displaystyle (-1).z=-(1+1i)=|z|(\cos(\theta +180^{\circ })+i\operatorname {sen}(\theta +180^{\circ }))={\sqrt {2}}(\cos 225^{\circ }+i\operatorname {sen} 225^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
Dados
z
=
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle z=|z|(\cos \theta +i\operatorname {sen} \theta )}
w
=
|
w
|
(
cos
90
∘
+
i
sen
90
∘
)
{\displaystyle w=|w|(\cos 90^{\circ }+i\operatorname {sen} 90^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
(
cos
θ
+
i
sen
θ
)
|
w
|
(
cos
90
∘
+
i
sen
90
∘
)
{\displaystyle z.w=|z|(\cos \theta +i\operatorname {sen} \theta )|w|(\cos 90^{\circ }+i\operatorname {sen} 90^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
|
w
|
[
(
cos
θ
.
cos
90
∘
−
sen
θ
.
cos
90
∘
)
+
i
(
cos
θ
.
cos
90
∘
+
sen
θ
.
cos
90
∘
)
{\displaystyle z.w=|z||w|[(\cos \theta .\cos 90^{\circ }-\operatorname {sen} \theta .\cos 90^{\circ })+i(\cos \theta .\cos 90^{\circ }+\operatorname {sen} \theta .\cos 90^{\circ })}
A partir desta etapa, é necessário utilizar a expressão trigonométrica da soma dos ângulos dos senos e cossenos:
{\displaystyle \quad }
{\displaystyle \quad }
cos
(
θ
+
α
)
=
cos
θ
.
cos
α
−
sen
θ
.
sen
α
{\displaystyle \cos(\theta +\alpha )=\cos \theta .\cos \alpha -\operatorname {sen} \theta .\operatorname {sen} \alpha }
{\displaystyle \quad }
{\displaystyle \quad }
sen
(
θ
+
α
)
=
cos
θ
.
sen
α
+
cos
α
.
sen
θ
{\displaystyle \operatorname {sen}(\theta +\alpha )=\cos \theta .\operatorname {sen} \alpha +\cos \alpha .\operatorname {sen} \theta }
Logo,
{\displaystyle \quad }
{\displaystyle \quad }
cos
(
θ
+
90
∘
)
=
cos
θ
.
cos
90
∘
−
sen
θ
.
sen
90
∘
{\displaystyle \cos(\theta +90^{\circ })=\cos \theta .\cos 90^{\circ }-\operatorname {sen} \theta .\operatorname {sen} 90^{\circ }}
{\displaystyle \quad }
{\displaystyle \quad }
sen
(
θ
+
90
∘
)
=
cos
θ
.
sen
90
∘
+
cos
90
∘
.
sen
θ
{\displaystyle \operatorname {sen}(\theta +90^{\circ })=\cos \theta .\operatorname {sen} 90^{\circ }+\cos 90^{\circ }.\operatorname {sen} \theta }
Então,
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
|
w
|
[
(
cos
θ
.
cos
90
∘
−
sen
θ
.
cos
90
∘
)
+
i
(
cos
θ
.
cos
90
∘
+
sen
θ
.
cos
90
∘
)
{\displaystyle z.w=|z||w|[(\cos \theta .\cos 90^{\circ }-\operatorname {sen} \theta .\cos 90^{\circ })+i(\cos \theta .\cos 90^{\circ }+\operatorname {sen} \theta .\cos 90^{\circ })}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
=
|
z
|
|
w
|
(
cos
(
θ
+
90
∘
)
+
i
sen
(
θ
+
90
∘
)
)
{\displaystyle =|z||w|(\cos(\theta +90^{\circ })+i\operatorname {sen}(\theta +90^{\circ }))}
O produto de um número complexo por um número imaginário puro corresponde a uma ampliação ou contração do vetor, seguido de uma rotação de
90
∘
{\displaystyle 90^{\circ }}
(colocar gif)
Dados
z
=
|
z
|
(
cos
θ
+
i
sen
θ
)
{\displaystyle z=|z|(\cos \theta +i\operatorname {sen} \theta )}
w
=
|
w
|
(
cos
α
+
i
sen
α
)
{\displaystyle w=|w|(\cos \alpha +i\operatorname {sen} \alpha )}
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
(
cos
θ
+
i
sen
θ
)
|
w
|
(
cos
α
+
i
sen
α
)
{\displaystyle z.w=|z|(\cos \theta +i\operatorname {sen} \theta )|w|(\cos \alpha +i\operatorname {sen} \alpha )}
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
|
w
|
[
(
cos
θ
.
cos
α
−
sen
θ
.
cos
α
)
+
i
(
cos
θ
.
cos
α
+
sen
θ
.
cos
α
)
{\displaystyle z.w=|z||w|[(\cos \theta .\cos \alpha -\operatorname {sen} \theta .\cos \alpha )+i(\cos \theta .\cos \alpha +\operatorname {sen} \theta .\cos \alpha )}
Assim como no caso anterior, é necessário utilizar a soma dos angulos dos senos e cossenos.
Logo,
{\displaystyle \quad }
{\displaystyle \quad }
z
.
w
=
|
z
|
|
w
|
(
cos
(
θ
+
α
)
+
i
sen
(
θ
+
α
)
)
{\displaystyle z.w=|z||w|(\cos(\theta +\alpha )+i\operatorname {sen}(\theta +\alpha ))}
O produto de um número complexo
z
{\displaystyle z}
w
{\displaystyle w}
w
{\displaystyle w}
(colocar gif)
A soma de números complexos corresponde à soma dos vetores complexos associados a esses números.
Dados quaisquer números reais
z
{\displaystyle z}
O
A
→
{\displaystyle {\vec {OA}}}
w
{\displaystyle w}
O
B
→
{\displaystyle {\vec {OB}}}
z
+
w
{\displaystyle z+w}
O
C
→
{\displaystyle {\vec {OC}}}
O
A
→
+
O
B
→
=
O
C
→
{\displaystyle {\vec {OA}}+{\vec {OB}}={\vec {OC}}}
Exemplos:
z
=
O
A
→
=
1
+
3
i
{\displaystyle z={\vec {OA}}=1+3i}
w
=
O
B
→
=
5
+
1
i
{\displaystyle w={\vec {OB}}=5+1i}
z
+
w
=
O
A
→
+
O
B
→
=
O
C
→
=
6
+
4
i
{\displaystyle z+w={\vec {OA}}+{\vec {OB}}={\vec {OC}}=6+4i}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
z
=
O
A
→
=
−
2
+
2
i
{\displaystyle z={\vec {OA}}=-2+2i}
w
=
O
B
→
=
4
+
2
i
{\displaystyle w={\vec {OB}}=4+2i}
z
+
w
=
O
A
→
+
O
B
→
=
O
C
→
=
2
+
4
i
{\displaystyle z+w={\vec {OA}}+{\vec {OB}}={\vec {OC}}=2+4i}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
z
=
O
A
→
=
−
2
+
2
i
{\displaystyle z={\vec {OA}}=-2+2i}
w
=
O
B
→
=
4
−
1
i
{\displaystyle w={\vec {OB}}=4-1i}
z
+
w
=
O
A
→
+
O
B
→
=
O
C
→
=
2
+
1
i
{\displaystyle z+w={\vec {OA}}+{\vec {OB}}={\vec {OC}}=2+1i}
{\displaystyle \quad }
{\displaystyle \quad }
O comprimento de um vetor
v
→
{\displaystyle {\overrightarrow {v}}}
v
→
{\displaystyle {\overrightarrow {v}}}
v
→
{\displaystyle {\overrightarrow {v}}}
|
v
→
|
{\displaystyle |{\overrightarrow {v}}|}
|
v
→
|
=
v
1
2
+
v
2
2
{\displaystyle |{\overrightarrow {v}}|={\sqrt {v_{1}^{2}+v_{2}^{2}}}}
v
→
=
(
v
1
,
v
2
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2})}
|
v
→
|
=
v
1
2
+
v
2
2
+
v
3
2
{\displaystyle |{\overrightarrow {v}}|={\sqrt {v_{1}^{2}+v_{2}^{2}+v_{3}^{2}}}}
v
→
=
(
v
1
,
v
2
,
v
3
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2},v_{3})}
A distância entre dois pontos do plano,
P
=
(
x
1
,
y
1
)
{\displaystyle P=(x_{1},y_{1})}
Q
=
(
x
2
,
y
2
)
{\displaystyle Q=(x_{2},y_{2})}
P
Q
→
{\displaystyle {\overrightarrow {PQ}}}
P
Q
→
=
Q
−
P
=
(
x
2
−
x
1
,
y
2
−
y
1
)
{\displaystyle {\overrightarrow {PQ}}=Q-P=(x_{2}-x_{1},y_{2}-y_{1})}
P
{\displaystyle P}
Q
{\displaystyle Q}
d
i
s
t
(
P
,
Q
)
=
|
P
Q
→
|
=
(
x
2
−
x
1
)
2
+
(
y
2
−
y
1
)
2
{\displaystyle dist(P,Q)=|{\overrightarrow {PQ}}|={\sqrt {(x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}}}}
Exemplo:
Dados os pontos do plano
P
=
(
0
,
0
)
{\displaystyle P=(0,0)}
Q
=
(
4
,
2
)
{\displaystyle Q=(4,2)}
A distância entre os pontos é igual a norma do vetor
P
Q
→
{\displaystyle {\overrightarrow {PQ}}}
d
i
s
t
(
P
,
Q
)
=
|
P
Q
→
|
{\displaystyle dist(P,Q)=|{\overrightarrow {PQ}}|}
P
Q
→
=
(
4
−
0
,
2
−
0
)
{\displaystyle {\overrightarrow {PQ}}=(4-0,2-0)}
|
P
Q
→
|
=
(
4
−
0
)
2
+
(
2
−
0
)
2
{\displaystyle |{\overrightarrow {PQ}}|={\sqrt {(4-0)^{2}+(2-0)^{2}}}}
d
i
s
t
(
P
,
Q
)
=
(
4
−
0
)
2
+
(
2
−
0
)
2
{\displaystyle dist(P,Q)={\sqrt {(4-0)^{2}+(2-0)^{2}}}}
d
i
s
t
(
P
,
Q
)
=
(
4
2
+
2
2
)
{\displaystyle dist(P,Q)={\sqrt {(4^{2}+2^{2})}}}
d
i
s
t
(
P
,
Q
)
=
(
16
+
4
)
{\displaystyle dist(P,Q)={\sqrt {(16+4)}}}
d
i
s
t
(
P
,
Q
)
=
(
20
)
{\displaystyle dist(P,Q)={\sqrt {(20)}}}
d
i
s
t
(
P
,
Q
)
=
2
5
{\displaystyle dist(P,Q)=2{\sqrt {5}}}
A distância entre dois pontos no espaço,
P
=
(
x
1
,
y
1
,
z
1
)
{\displaystyle P=(x_{1},y_{1},z_{1})}
Q
=
(
x
2
,
y
2
,
z
2
)
{\displaystyle Q=(x_{2},y_{2},z_{2})}
P
Q
→
{\displaystyle {\overrightarrow {PQ}}}
P
Q
→
=
Q
−
P
=
(
x
2
−
x
1
,
y
2
−
y
1
,
z
2
−
z
1
)
{\displaystyle {\overrightarrow {PQ}}=Q-P=(x_{2}-x_{1},y_{2}-y_{1},z_{2}-z_{1})}
P
{\displaystyle P}
Q
{\displaystyle Q}
d
i
s
t
(
P
,
Q
)
=
|
P
Q
→
|
=
(
x
2
−
x
1
)
2
+
(
y
2
−
y
1
)
2
+
(
z
2
−
z
1
)
2
{\displaystyle dist(P,Q)=|{\overrightarrow {PQ}}|={\sqrt {(x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}+(z_{2}-z_{1})^{2}}}}
(Colocar Imagem)
O produto escalar de dois vetores
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
u
→
.
v
→
=
{
0
,
se
u
→
ou
v
→
é o vetor nulo
|
u
→
|
|
v
→
|
c
o
s
θ
,
caso nenhum deles seja nulo
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\begin{cases}0,&{\text{ se }}{\overrightarrow {u}}{\text{ ou }}{\overrightarrow {v}}{\text{ é o vetor nulo}}\\|{\overrightarrow {u}}||{\overrightarrow {v}}|cos\theta ,&{\text{ caso nenhum deles seja nulo}}\end{cases}}}
θ
{\displaystyle \theta }
Quando os vetores são dados em termos das suas componentes, não há como sabermos diretamente o ângulo entre eles. Para descobrir, é necessário uma forma de calcular o produto escalar que não necessite do ângulo entre os vetores.
Se
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
θ
{\displaystyle \theta }
|
u
→
−
v
→
|
2
=
|
u
→
|
2
+
|
v
→
|
2
−
2
|
u
→
|
|
v
→
|
c
o
s
θ
{\displaystyle |{\overrightarrow {u}}-{\overrightarrow {v}}|^{2}=|{\overrightarrow {u}}|^{2}+|{\overrightarrow {v}}|^{2}-2|{\overrightarrow {u}}||{\overrightarrow {v}}|cos\theta }
Assim,
u
→
.
v
→
=
|
u
→
|
|
v
→
|
c
o
s
θ
=
1
2
(
|
u
→
|
2
+
|
v
→
|
2
−
|
u
→
−
v
→
|
2
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}=|{\overrightarrow {u}}||{\overrightarrow {v}}|cos\theta ={\frac {1}{2}}(|{\overrightarrow {u}}|^{2}+|{\overrightarrow {v}}|^{2}-|{\overrightarrow {u}}-{\overrightarrow {v}}|^{2})}
Substituindo-se as coordenadas dos vetores, obtemos uma expressão mais simples para o cálculo do produto interno.
Sendo
v
→
=
(
v
1
,
v
2
,
v
3
)
{\displaystyle {\vec {v}}=(v_{1},v_{2},v_{3})}
u
→
=
(
u
1
,
u
2
,
u
3
)
{\displaystyle {\vec {u}}=(u_{1},u_{2},u_{3})}
|
v
→
|
2
=
v
1
2
+
v
2
2
+
v
3
2
{\displaystyle |{\vec {v}}|^{2}=v_{1}^{2}+v_{2}^{2}+v_{3}^{2}}
|
u
→
|
2
=
u
1
2
+
u
2
2
+
u
3
2
{\displaystyle |{\vec {u}}|^{2}=u_{1}^{2}+u_{2}^{2}+u_{3}^{2}}
|
v
→
−
u
→
|
2
=
(
v
1
−
u
1
)
2
+
(
v
2
−
u
2
)
2
+
(
v
3
−
u
3
)
2
{\displaystyle |{\vec {v}}-{\vec {u}}|^{2}=(v_{1}-u_{1})^{2}+(v_{2}-u_{2})^{2}+(v_{3}-u_{3})^{2}}
obtemos,
{\displaystyle \quad }
u
→
.
v
→
=
1
2
(
|
u
→
|
2
+
|
v
→
|
2
−
|
u
→
−
v
→
|
2
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\frac {1}{2}}(|{\overrightarrow {u}}|^{2}+|{\overrightarrow {v}}|^{2}-|{\overrightarrow {u}}-{\overrightarrow {v}}|^{2})}
⇒
{\displaystyle \Rightarrow }
u
→
.
v
→
=
1
2
(
u
1
2
+
u
2
2
+
u
3
2
+
v
1
2
+
v
2
2
+
v
3
2
−
(
(
u
1
−
v
1
)
2
+
(
u
2
−
v
2
)
2
+
(
u
3
−
v
3
)
2
)
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\frac {1}{2}}(u_{1}^{2}+u_{2}^{2}+u_{3}^{2}+v_{1}^{2}+v_{2}^{2}+v_{3}^{2}-((u_{1}-v_{1})^{2}+(u_{2}-v_{2})^{2}+(u_{3}-v_{3})^{2}))}
⇒
{\displaystyle \Rightarrow }
u
→
.
v
→
=
1
2
(
u
1
2
+
u
2
2
+
u
3
2
+
v
1
2
+
v
2
2
+
v
3
2
−
(
u
1
2
−
2
u
1
v
1
+
v
1
2
+
u
2
2
−
2
u
2
v
2
+
v
2
2
+
u
3
2
−
2
u
3
v
3
+
v
3
2
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\frac {1}{2}}(u_{1}^{2}+u_{2}^{2}+u_{3}^{2}+v_{1}^{2}+v_{2}^{2}+v_{3}^{2}-(u_{1}^{2}-2u_{1}v_{1}+v_{1}^{2}+u_{2}^{2}-2u_{2}v_{2}+v_{2}^{2}+u_{3}^{2}-2u_{3}v_{3}+v_{3}^{2})}
⇒
{\displaystyle \Rightarrow }
u
→
.
v
→
=
1
2
(
u
1
2
+
u
2
2
+
u
3
2
+
v
1
2
+
v
2
2
+
v
3
2
−
u
1
2
+
2
u
1
v
1
−
v
1
2
−
u
2
2
+
2
u
2
v
2
−
v
2
2
−
u
3
2
+
2
u
3
v
3
−
v
3
2
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\frac {1}{2}}(u_{1}^{2}+u_{2}^{2}+u_{3}^{2}+v_{1}^{2}+v_{2}^{2}+v_{3}^{2}-u_{1}^{2}+2u_{1}v_{1}-v_{1}^{2}-u_{2}^{2}+2u_{2}v_{2}-v_{2}^{2}-u_{3}^{2}+2u_{3}v_{3}-v_{3}^{2})}
⇒
{\displaystyle \Rightarrow }
u
→
.
v
→
=
1
2
(
2
u
1
v
1
+
2
u
2
v
2
+
2
u
3
v
3
)
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\frac {1}{2}}(2u_{1}v_{1}+2u_{2}v_{2}+2u_{3}v_{3})}
⇒
{\displaystyle \Rightarrow }
u
→
.
v
→
=
u
1
v
1
+
u
2
v
2
+
u
3
v
3
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}=u_{1}v_{1}+u_{2}v_{2}+u_{3}v_{3}}
{\displaystyle \quad }
O produto escalar,
u
→
.
v
→
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
u
→
.
v
→
=
u
1
v
1
+
u
2
v
2
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}=u_{1}v_{1}+u_{2}v_{2}}
se
u
→
=
(
u
1
,
u
2
)
{\displaystyle {\overrightarrow {u}}=(u_{1},u_{2})}
v
→
=
(
v
1
,
v
2
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2})}
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
{\displaystyle \quad }
u
→
.
v
→
=
u
1
v
1
+
u
2
v
2
+
u
3
v
3
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}=u_{1}v_{1}+u_{2}v_{2}+u_{3}v_{3}}
se
u
→
=
(
u
1
,
u
2
,
u
3
)
{\displaystyle {\overrightarrow {u}}=(u_{1},u_{2},u_{3})}
v
→
=
(
v
1
,
v
2
,
v
3
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2},v_{3})}
{\displaystyle \quad }
Sejam
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
α
{\displaystyle \alpha }
Comutatividade :
u
→
.
v
→
=
v
→
.
u
→
{\displaystyle {\overrightarrow {u}}.{\overrightarrow {v}}={\overrightarrow {v}}.{\overrightarrow {u}}}
Demonstração:
u
→
.
v
→
=
u
1
v
1
+
u
2
v
2
{\displaystyle \quad {\overrightarrow {u}}.{\overrightarrow {v}}=u_{1}v_{1}+u_{2}v_{2}}
=
v
1
u
1
+
v
2
u
2
{\displaystyle =v_{1}u_{1}+v_{2}u_{2}}
=
v
→
.
u
→
{\displaystyle ={\overrightarrow {v}}.{\overrightarrow {u}}}
Distributividade:
u
→
.
(
v
→
+
w
→
)
=
u
→
.
v
→
+
u
→
.
w
→
{\displaystyle {\overrightarrow {u}}.({\overrightarrow {v}}+{\overrightarrow {w}})={\overrightarrow {u}}.{\overrightarrow {v}}+{\overrightarrow {u}}.{\overrightarrow {w}}}
Demonstração:
u
→
.
(
v
→
+
w
→
)
=
(
u
1
u
2
)
.
(
v
1
+
w
1
,
v
2
+
w
2
)
=
u
1
.
(
v
1
+
w
1
)
+
u
2
.
(
v
2
+
w
2
)
=
(
u
1
v
1
+
u
1
w
1
)
+
(
u
2
v
2
+
u
2
w
2
)
=
(
u
1
v
1
+
u
2
v
2
)
+
(
u
1
w
1
+
u
2
w
2
)
=
u
→
.
v
→
+
u
→
.
w
→
{\displaystyle \quad {\overrightarrow {u}}.({\overrightarrow {v}}+{\overrightarrow {w}})=(u_{1}u_{2}).(v_{1}+w_{1},v_{2}+w_{2})=u_{1}.(v_{1}+w_{1})+u_{2}.(v_{2}+w_{2})=(u_{1}v_{1}+u_{1}w_{1})+(u_{2}v_{2}+u_{2}w_{2})=(u_{1}v_{1}+u_{2}v_{2})+(u_{1}w_{1}+u_{2}w_{2})={\overrightarrow {u}}.{\overrightarrow {v}}+{\overrightarrow {u}}.{\overrightarrow {w}}}
Associatividade:
α
(
u
→
.
v
→
)
=
(
α
u
→
)
.
v
→
=
(
α
v
→
)
.
u
→
{\displaystyle \alpha ({\overrightarrow {u}}.{\overrightarrow {v}})=(\alpha {\overrightarrow {u}}).{\overrightarrow {v}}=(\alpha {\overrightarrow {v}}).{\overrightarrow {u}}}
Demonstração:
α
.
(
u
→
.
v
→
)
=
α
.
(
u
1
v
1
+
u
2
v
2
)
=
(
α
u
1
)
.
v
1
+
(
α
u
2
)
.
v
2
=
(
α
u
→
)
.
v
→
=
(
α
v
→
)
.
u
→
{\displaystyle \quad \alpha .({\overrightarrow {u}}.{\overrightarrow {v}})=\alpha .(u_{1}v_{1}+u_{2}v_{2})=(\alpha u_{1}).v_{1}+(\alpha u_{2}).v_{2}=(\alpha {\overrightarrow {u}}).{\overrightarrow {v}}=(\alpha {\overrightarrow {v}}).{\overrightarrow {u}}}
Dados dois vetores
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
projeção ortogonal de
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
, denotada por
p
r
o
j
w
→
v
→
{\displaystyle proj_{\overrightarrow {w}}^{\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
−
p
r
o
j
w
→
v
→
{\displaystyle {\overrightarrow {v}}-proj_{\overrightarrow {w}}^{\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
Seja
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
p
r
o
j
w
→
v
→
=
(
v
→
.
w
→
|
w
→
|
2
)
.
w
→
{\displaystyle proj_{\overrightarrow {w}}^{\overrightarrow {v}}=\left({\frac {{\overrightarrow {v}}.{\overrightarrow {w}}}{|{\overrightarrow {w}}|^{2}}}\right).{\overrightarrow {w}}}
Demonstração:
Sejam
v
→
1
=
p
r
o
j
w
→
v
→
{\displaystyle {\overrightarrow {v}}_{1}=proj_{\overrightarrow {w}}^{\overrightarrow {v}}}
v
→
2
=
v
→
−
p
r
o
j
w
→
v
→
{\displaystyle {\overrightarrow {v}}_{2}={\overrightarrow {v}}-proj_{\overrightarrow {w}}^{\overrightarrow {v}}}
v
→
1
{\displaystyle {\overrightarrow {v}}_{1}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
1
=
α
w
→
{\displaystyle \qquad {\overrightarrow {v}}_{1}=\alpha {\overrightarrow {w}}}
v
→
2
=
v
→
−
α
w
→
{\displaystyle {\overrightarrow {v}}_{2}={\overrightarrow {v}}-\alpha {\overrightarrow {w}}}
Multiplicando-se escalarmente
v
→
2
{\displaystyle {\overrightarrow {v}}_{2}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
2
.
w
→
=
(
v
→
−
α
w
→
)
.
w
→
=
v
→
.
w
→
−
α
|
w
→
|
2
{\displaystyle \qquad {\overrightarrow {v}}_{2}.{\overrightarrow {w}}=({\overrightarrow {v}}-\alpha {\overrightarrow {w}}).{\overrightarrow {w}}={\overrightarrow {v}}.{\overrightarrow {w}}-\alpha |{\overrightarrow {w}}|^{2}}
v
→
2
{\displaystyle {\overrightarrow {v}}_{2}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
2
.
w
→
=
0
{\displaystyle {\overrightarrow {v}}_{2}.{\overrightarrow {w}}=0}
α
=
v
→
.
w
→
|
w
→
|
2
{\displaystyle \qquad \alpha ={\frac {{\overrightarrow {v}}.{\overrightarrow {w}}}{|{\overrightarrow {w}}|^{2}}}}
Substituindo na equação
v
→
1
=
α
w
→
{\displaystyle {\overrightarrow {v}}_{1}=\alpha {\overrightarrow {w}}}
p
r
o
j
w
→
v
→
=
(
v
→
.
w
→
|
w
→
|
2
)
.
w
→
{\displaystyle \qquad proj_{\overrightarrow {w}}^{\overrightarrow {v}}=\left({\frac {{\overrightarrow {v}}.{\overrightarrow {w}}}{|{\overrightarrow {w}}|^{2}}}\right).{\overrightarrow {w}}}
Exemplo:
Sejam
v
→
=
(
2
,
−
1
,
3
)
{\displaystyle {\overrightarrow {v}}=(2,-1,3)}
w
→
=
(
4
,
−
1
,
2
)
{\displaystyle {\overrightarrow {w}}=(4,-1,2)}
v
→
1
{\displaystyle {\overrightarrow {v}}_{1}}
v
→
2
{\displaystyle {\overrightarrow {v}}_{2}}
v
→
=
v
→
1
+
v
→
2
{\displaystyle {\overrightarrow {v}}={\overrightarrow {v}}_{1}+{\overrightarrow {v}}_{2}}
v
→
1
{\displaystyle {\overrightarrow {v}}_{1}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
2
{\displaystyle {\overrightarrow {v}}_{2}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
⋅
w
→
=
2
⋅
4
+
(
−
1
)
⋅
(
−
1
)
+
3
⋅
2
=
8
+
1
+
6
=
15
{\displaystyle \qquad {\overrightarrow {v}}\cdot {\overrightarrow {w}}=2\cdot 4+(-1)\cdot (-1)+3\cdot 2=8+1+6=15}
|
w
→
|
2
=
4
2
+
(
−
1
)
2
+
2
2
=
16
+
1
+
4
=
21
{\displaystyle \qquad |{\overrightarrow {w}}|^{2}=4^{2}+(-1)^{2}+2^{2}=16+1+4=21}
v
→
1
=
p
r
o
j
w
→
v
→
=
(
v
→
.
w
→
|
w
→
|
2
)
.
w
→
=
(
15
21
)
.
(
4
,
−
1
,
2
)
=
(
60
21
,
−
15
21
,
30
21
)
=
(
20
7
,
−
5
7
,
10
7
)
{\displaystyle \qquad {\overrightarrow {v}}_{1}=proj_{\overrightarrow {w}}^{\overrightarrow {v}}=\left({\frac {{\overrightarrow {v}}.{\overrightarrow {w}}}{|{\overrightarrow {w}}|^{2}}}\right).{\overrightarrow {w}}=\left({\frac {15}{21}}\right).(4,-1,2)=\left({\frac {60}{21}},-{\frac {15}{21}},{\frac {30}{21}}\right)=\left({\frac {20}{7}},-{\frac {5}{7}},{\frac {10}{7}}\right)}
v
→
2
=
v
→
−
v
→
1
=
(
2
,
−
1
,
3
)
−
(
20
7
,
−
5
7
,
10
7
)
=
(
−
6
7
,
−
2
7
,
11
7
)
{\displaystyle \qquad {\overrightarrow {v}}_{2}={\overrightarrow {v}}-{\overrightarrow {v}}_{1}=(2,-1,3)-\left({\frac {20}{7}},-{\frac {5}{7}},{\frac {10}{7}}\right)=\left(-{\frac {6}{7}},-{\frac {2}{7}},{\frac {11}{7}}\right)}
Sejam
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
A norma de
v
→
×
w
→
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
|
v
→
×
w
→
|
=
|
v
→
|
⋅
|
w
→
|
.
sen
θ
{\displaystyle \qquad \qquad |{\overrightarrow {v}}\times {\overrightarrow {w}}|=|{\overrightarrow {v}}|\cdot |{\overrightarrow {w}}|.\operatorname {sen} \theta }
Tem direção perpendicular a
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
Tem o sentido dado pela regra da mão direita. Se o ângulo entre
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
θ
{\displaystyle \theta }
v
→
{\displaystyle {\overrightarrow {v}}}
θ
{\displaystyle \theta }
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
×
w
→
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}}
Regra da mão direita Sejam
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
α
{\displaystyle \alpha }
v
→
×
w
→
=
−
(
w
→
×
v
→
)
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}=-({\overrightarrow {w}}\times {\overrightarrow {v}})}
{\displaystyle \qquad \qquad }
v
→
×
w
→
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}}
w
→
×
v
→
{\displaystyle {\overrightarrow {w}}\times {\overrightarrow {v}}}
v
→
×
w
→
=
0
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}=0}
v
→
=
α
w
→
{\displaystyle {\overrightarrow {v}}=\alpha {\overrightarrow {w}}}
w
→
=
α
v
→
{\displaystyle {\overrightarrow {w}}=\alpha {\overrightarrow {v}}}
{\displaystyle \qquad \qquad }
|
v
→
×
w
→
|
=
0
{\displaystyle |{\overrightarrow {v}}\times {\overrightarrow {w}}|=0}
sen
θ
=
0
{\displaystyle \operatorname {sen} \theta =0}
θ
{\displaystyle \theta }
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
(
v
→
×
w
→
)
⋅
v
→
=
(
v
→
×
w
→
)
⋅
w
→
=
0
{\displaystyle ({\overrightarrow {v}}\times {\overrightarrow {w}})\cdot {\overrightarrow {v}}=({\overrightarrow {v}}\times {\overrightarrow {w}})\cdot {\overrightarrow {w}}=0}
α
(
v
→
×
w
→
)
=
(
α
v
→
)
×
w
→
=
v
→
×
(
α
w
→
)
{\displaystyle \alpha ({\overrightarrow {v}}\times {\overrightarrow {w}})=(\alpha {\overrightarrow {v}})\times {\overrightarrow {w}}={\overrightarrow {v}}\times (\alpha {\overrightarrow {w}})}
v
→
×
(
w
→
+
u
→
)
=
v
→
×
w
→
+
v
→
×
u
→
{\displaystyle {\overrightarrow {v}}\times ({\overrightarrow {w}}+{\overrightarrow {u}})={\overrightarrow {v}}\times {\overrightarrow {w}}+{\overrightarrow {v}}\times {\overrightarrow {u}}}
(
v
→
+
w
→
)
×
u
→
=
v
→
×
u
→
+
w
→
×
u
→
{\displaystyle ({\overrightarrow {v}}+{\overrightarrow {w}})\times {\overrightarrow {u}}={\overrightarrow {v}}\times {\overrightarrow {u}}+{\overrightarrow {w}}\times {\overrightarrow {u}}}
{\displaystyle \quad }
Vetores unitários são vetores paralelos aos eixos coordenados, de norma igual a um.
Todo vetor
v
→
=
(
v
1
,
v
2
,
v
3
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2},v_{3})}
i
→
{\displaystyle {\overrightarrow {i}}}
j
→
{\displaystyle {\overrightarrow {j}}}
k
→
{\displaystyle {\overrightarrow {k}}}
v
→
=
(
v
1
,
v
2
,
v
3
)
=
(
v
1
,
0
,
0
)
+
(
0
,
v
2
,
0
)
+
(
0
,
0
,
v
3
)
=
v
1
(
1
,
0
,
0
)
+
v
2
(
0
,
1
,
0
)
+
v
3
(
0
,
0
,
1
)
=
v
1
i
→
+
v
2
j
→
+
v
3
k
→
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2},v_{3})=(v_{1},0,0)+(0,v_{2},0)+(0,0,v_{3})=v_{1}(1,0,0)+v_{2}(0,1,0)+v_{3}(0,0,1)=v_{1}{\overrightarrow {i}}+v_{2}{\overrightarrow {j}}+v_{3}{\overrightarrow {k}}}
Da definição do produto vetorial, obtêm-se as seguintes relações:
i
→
×
i
→
=
0
{\displaystyle \quad {\overrightarrow {i}}\times {\overrightarrow {i}}=0}
j
→
×
j
→
=
0
{\displaystyle \quad {\overrightarrow {j}}\times {\overrightarrow {j}}=0}
k
→
×
k
→
=
0
{\displaystyle \quad {\overrightarrow {k}}\times {\overrightarrow {k}}=0}
i
→
×
j
→
=
k
→
{\displaystyle \quad {\overrightarrow {i}}\times {\overrightarrow {j}}={\overrightarrow {k}}}
j
→
×
k
→
=
i
→
{\displaystyle \quad {\overrightarrow {j}}\times {\overrightarrow {k}}={\overrightarrow {i}}}
k
→
×
i
→
=
j
→
{\displaystyle \quad {\overrightarrow {k}}\times {\overrightarrow {i}}={\overrightarrow {j}}}
j
→
×
i
→
=
−
k
→
{\displaystyle \quad {\overrightarrow {j}}\times {\overrightarrow {i}}=-{\overrightarrow {k}}}
k
→
×
j
→
=
−
i
→
{\displaystyle \quad {\overrightarrow {k}}\times {\overrightarrow {j}}=-{\overrightarrow {i}}}
i
→
×
k
→
=
−
j
→
{\displaystyle \quad {\overrightarrow {i}}\times {\overrightarrow {k}}=-{\overrightarrow {j}}}
Sejam
v
→
=
(
v
1
,
v
2
,
v
3
)
{\displaystyle {\overrightarrow {v}}=(v_{1},v_{2},v_{3})}
w
→
=
(
w
1
,
w
2
,
w
3
)
{\displaystyle {\overrightarrow {w}}=(w_{1},w_{2},w_{3})}
produto vetorial
v
→
×
w
→
{\displaystyle {\overrightarrow {v}}\times {\overrightarrow {w}}}
v
→
×
w
→
=
[
i
j
k
u
1
u
2
u
3
v
1
v
2
v
3
]
{\displaystyle \qquad {\overrightarrow {v}}\times {\overrightarrow {w}}={\begin{bmatrix}i&j&k\\u_{1}&u_{2}&u_{3}\\v_{1}&v_{2}&v_{3}\end{bmatrix}}}
Demonstração:
v
→
=
v
1
i
→
+
v
2
j
→
+
v
3
k
→
{\displaystyle \qquad {\overrightarrow {v}}=v_{1}{\overrightarrow {i}}+v_{2}{\overrightarrow {j}}+v_{3}{\overrightarrow {k}}}
w
→
=
w
1
i
→
+
w
2
j
→
+
w
3
k
→
{\displaystyle {\overrightarrow {w}}=w_{1}{\overrightarrow {i}}+w_{2}{\overrightarrow {j}}+w_{3}{\overrightarrow {k}}}
v
→
×
w
→
=
(
v
1
i
→
+
v
2
j
→
+
v
3
k
→
)
×
(
w
1
i
→
+
w
2
j
→
+
w
3
k
→
)
{\displaystyle \qquad {\overrightarrow {v}}\times {\overrightarrow {w}}=(v_{1}{\overrightarrow {i}}+v_{2}{\overrightarrow {j}}+v_{3}{\overrightarrow {k}})\times (w_{1}{\overrightarrow {i}}+w_{2}{\overrightarrow {j}}+w_{3}{\overrightarrow {k}})}
=
v
1
w
1
(
i
→
×
i
→
)
+
v
1
w
2
(
i
→
×
j
→
)
+
v
1
w
3
(
i
→
×
k
→
)
+
v
2
w
1
(
j
→
×
i
→
)
+
v
2
w
2
(
j
→
×
j
→
)
+
v
2
w
3
(
j
→
×
k
→
)
+
v
3
w
1
(
k
→
×
i
→
)
+
v
3
w
2
(
k
→
×
j
→
)
+
v
3
w
3
(
k
→
×
k
→
)
{\displaystyle \qquad \qquad \quad =v_{1}w_{1}({\overrightarrow {i}}\times {\overrightarrow {i}})+v_{1}w_{2}({\overrightarrow {i}}\times {\overrightarrow {j}})+v_{1}w_{3}({\overrightarrow {i}}\times {\overrightarrow {k}})+v_{2}w_{1}({\overrightarrow {j}}\times {\overrightarrow {i}})+v_{2}w_{2}({\overrightarrow {j}}\times {\overrightarrow {j}})+v_{2}w_{3}({\overrightarrow {j}}\times {\overrightarrow {k}})+v_{3}w_{1}({\overrightarrow {k}}\times {\overrightarrow {i}})+v_{3}w_{2}({\overrightarrow {k}}\times {\overrightarrow {j}})+v_{3}w_{3}({\overrightarrow {k}}\times {\overrightarrow {k}})}
=
v
1
w
2
(
i
→
×
j
→
)
+
v
1
w
3
(
i
→
×
k
→
)
+
v
2
w
1
(
j
→
×
i
→
)
+
v
2
w
3
(
j
→
×
k
→
)
+
v
3
w
1
(
k
→
×
i
→
)
+
v
3
w
2
(
k
→
×
j
→
)
{\displaystyle \qquad \qquad \quad =v_{1}w_{2}({\overrightarrow {i}}\times {\overrightarrow {j}})+v_{1}w_{3}({\overrightarrow {i}}\times {\overrightarrow {k}})+v_{2}w_{1}({\overrightarrow {j}}\times {\overrightarrow {i}})+v_{2}w_{3}({\overrightarrow {j}}\times {\overrightarrow {k}})+v_{3}w_{1}({\overrightarrow {k}}\times {\overrightarrow {i}})+v_{3}w_{2}({\overrightarrow {k}}\times {\overrightarrow {j}})}
i
→
×
i
→
=
j
→
×
j
→
=
k
→
×
k
→
=
0
{\displaystyle {\overrightarrow {i}}\times {\overrightarrow {i}}={\overrightarrow {j}}\times {\overrightarrow {j}}={\overrightarrow {k}}\times {\overrightarrow {k}}=0}
=
(
v
1
w
2
)
k
→
+
(
v
1
w
3
)
(
−
j
→
)
+
(
v
2
w
1
)
(
−
k
→
)
+
(
v
2
w
3
)
i
→
+
(
v
3
w
1
)
j
→
+
(
v
3
w
2
)
(
−
i
→
)
{\displaystyle \qquad \qquad \quad =(v_{1}w_{2}){\overrightarrow {k}}+(v_{1}w_{3})(-{\overrightarrow {j}})+(v_{2}w_{1})(-{\overrightarrow {k}})+(v_{2}w_{3}){\overrightarrow {i}}+(v_{3}w_{1}){\overrightarrow {j}}+(v_{3}w_{2})(-{\overrightarrow {i}})}
=
(
v
2
w
3
−
v
3
w
2
)
i
→
+
(
v
3
w
1
−
v
1
w
3
)
j
→
+
(
v
1
w
2
−
v
2
w
1
)
k
→
{\displaystyle \qquad \qquad \quad =(v_{2}w_{3}-v_{3}w_{2}){\overrightarrow {i}}+(v_{3}w_{1}-v_{1}w_{3}){\overrightarrow {j}}+(v_{1}w_{2}-v_{2}w_{1}){\overrightarrow {k}}}
=
[
i
j
k
v
1
v
2
v
3
w
1
w
2
w
3
]
{\displaystyle \qquad \qquad \quad ={\begin{bmatrix}i&j&k\\v_{1}&v_{2}&v_{3}\\w_{1}&w_{2}&w_{3}\end{bmatrix}}}
Exemplo:
Sejam
v
→
=
i
→
+
2
j
→
−
2
k
→
{\displaystyle {\overrightarrow {v}}={\overrightarrow {i}}+2{\overrightarrow {j}}-2{\overrightarrow {k}}}
w
→
=
3
i
→
+
k
→
{\displaystyle {\overrightarrow {w}}=3{\overrightarrow {i}}+{\overrightarrow {k}}}
v
→
×
w
→
=
[
i
j
k
v
1
v
2
v
3
w
1
w
2
w
3
]
{\displaystyle \qquad {\overrightarrow {v}}\times {\overrightarrow {w}}={\begin{bmatrix}i&j&k\\v_{1}&v_{2}&v_{3}\\w_{1}&w_{2}&w_{3}\end{bmatrix}}}
=
[
i
j
k
1
2
−
2
3
0
1
]
{\displaystyle \qquad \qquad \quad ={\begin{bmatrix}i&j&k\\1&2&-2\\3&0&1\end{bmatrix}}}
=
(
2
−
0
)
i
→
+
(
−
6
−
1
)
j
→
+
(
0
−
6
)
k
→
{\displaystyle \qquad \qquad \quad =(2-0){\overrightarrow {i}}+(-6-1){\overrightarrow {j}}+(0-6){\overrightarrow {k}}}
=
2
i
→
−
7
j
→
−
6
k
→
=
(
2
,
−
7
,
−
6
)
{\displaystyle \qquad \qquad \quad =2{\overrightarrow {i}}-7{\overrightarrow {j}}-6{\overrightarrow {k}}=(2,-7,-6)}
O produto misto de
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
u
→
⋅
(
v
→
×
w
→
)
{\displaystyle {\overrightarrow {u}}\cdot ({\overrightarrow {v}}\times {\overrightarrow {w}})}
Sejam
u
→
=
(
u
1
i
→
,
u
2
j
→
,
u
3
k
→
)
{\displaystyle {\overrightarrow {u}}=(u_{1}{\overrightarrow {i}},u_{2}{\overrightarrow {j}},u_{3}{\overrightarrow {k}})}
v
→
=
(
v
1
i
→
,
v
2
j
→
,
v
3
k
→
)
{\displaystyle {\overrightarrow {v}}=(v_{1}{\overrightarrow {i}},v_{2}{\overrightarrow {j}},v_{3}{\overrightarrow {k}})}
w
→
=
(
w
1
i
→
,
w
2
j
→
,
w
3
k
→
)
{\displaystyle {\overrightarrow {w}}=(w_{1}{\overrightarrow {i}},w_{2}{\overrightarrow {j}},w_{3}{\overrightarrow {k}})}
u
→
⋅
(
v
→
×
w
→
)
=
[
u
1
u
2
u
3
v
1
v
2
v
3
w
1
w
2
w
3
]
{\displaystyle \qquad {\overrightarrow {u}}\cdot ({\overrightarrow {v}}\times {\overrightarrow {w}})={\begin{bmatrix}u_{1}&u_{2}&u_{3}\\v_{1}&v_{2}&v_{3}\\w_{1}&w_{2}&w_{3}\end{bmatrix}}}
Exemplo:
O produto misto dos vetores
u
→
=
2
i
→
−
j
→
+
3
k
→
{\displaystyle {\overrightarrow {u}}=2{\overrightarrow {i}}-{\overrightarrow {j}}+3{\overrightarrow {k}}}
v
→
=
−
i
→
+
4
j
→
+
k
→
{\displaystyle {\overrightarrow {v}}=-{\overrightarrow {i}}+4{\overrightarrow {j}}+{\overrightarrow {k}}}
w
→
=
5
i
→
+
j
→
−
2
k
→
{\displaystyle {\overrightarrow {w}}=5{\overrightarrow {i}}+{\overrightarrow {j}}-2{\overrightarrow {k}}}
u
→
⋅
(
v
→
×
w
→
)
=
[
u
1
u
2
u
3
v
1
v
2
v
3
w
1
w
2
w
3
]
{\displaystyle \qquad {\overrightarrow {u}}\cdot ({\overrightarrow {v}}\times {\overrightarrow {w}})={\begin{bmatrix}u_{1}&u_{2}&u_{3}\\v_{1}&v_{2}&v_{3}\\w_{1}&w_{2}&w_{3}\end{bmatrix}}}
=
[
2
−
1
3
−
1
4
1
5
1
−
2
]
{\displaystyle \qquad \qquad \qquad \quad ={\begin{bmatrix}2&-1&3\\-1&4&1\\5&1&-2\end{bmatrix}}}
=
(
−
16
−
2
)
+
(
−
5
−
(
−
2
)
)
+
(
−
3
−
60
)
{\displaystyle \qquad \qquad \qquad \quad =(-16-2)+(-5-(-2))+(-3-60)}
=
−
18
−
3
−
63
=
−
84
{\displaystyle \qquad \qquad \qquad \quad =-18-3-63=-84}
{\displaystyle \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad }
Dados três vetores no espaço
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
|
u
→
⋅
(
v
→
×
w
→
)
|
{\displaystyle |{\overrightarrow {u}}\cdot ({\overrightarrow {v}}\times {\overrightarrow {w}})|}
volume do paralelepípedo determinado por
u
→
{\displaystyle {\overrightarrow {u}}}
v
→
{\displaystyle {\overrightarrow {v}}}
w
→
{\displaystyle {\overrightarrow {w}}}
(colocar imagem)
Exemplo:
Sejam
u
→
=
3
i
→
+
3
j
→
+
4
k
→
{\displaystyle {\overrightarrow {u}}=3{\overrightarrow {i}}+3{\overrightarrow {j}}+4{\overrightarrow {k}}}
v
→
=
4
i
→
−
j
→
−
3
k
→
{\displaystyle {\overrightarrow {v}}=4{\overrightarrow {i}}-{\overrightarrow {j}}-3{\overrightarrow {k}}}
w
→
=
2
i
→
+
5
j
→
+
k
→
{\displaystyle {\overrightarrow {w}}=2{\overrightarrow {i}}+5{\overrightarrow {j}}+{\overrightarrow {k}}}
v
o
l
u
m
e
=
|
u
→
⋅
(
v
→
×
w
→
)
|
{\displaystyle \qquad volume=|{\overrightarrow {u}}\cdot ({\overrightarrow {v}}\times {\overrightarrow {w}})|}
=
‖
u
1
u
2
u
3
v
1
v
2
v
3
w
1
w
2
w
3
‖
{\displaystyle \qquad \qquad \quad ={\begin{Vmatrix}u_{1}&u_{2}&u_{3}\\v_{1}&v_{2}&v_{3}\\w_{1}&w_{2}&w_{3}\end{Vmatrix}}}
=
‖
3
3
4
4
−
1
−
3
2
5
1
‖
{\displaystyle \qquad \qquad \quad ={\begin{Vmatrix}3&3&4\\4&-1&-3\\2&5&1\end{Vmatrix}}}
=
|
(
−
3
−
(
−
45
)
)
+
(
−
18
−
12
)
+
(
80
−
(
−
8
)
)
|
{\displaystyle \qquad \qquad \quad =|(-3-(-45))+(-18-12)+(80-(-8))|}
=
|
42
−
30
+
88
|
{\displaystyle \qquad \qquad \quad =|42-30+88|}
=
|
100
|
=
100
{\displaystyle \qquad \qquad \quad =|100|=100}
{\displaystyle \quad }
------------Página Vetores--------------------
-------------Ângulos--------------
↑ a b c d e f g Ripoll, Cydara Cavedon (2011). Números Racionais, Reais e Complexos Ed. 2 . [S.l.]: UFRGS. ISBN 9788538601289 

![{\displaystyle \mathbb {Z} =[...-3,-2,-1,1,2,3...]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7d384544f25d30df05034869bba59328a8732ac8)

![{\displaystyle =\mathbb {Z} -[0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7c4c32812489d4f2e4d71fa424c6bc490ec1dbbd)

![{\displaystyle =[0,1,2,3...]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c38c854524a2ac1ded987a3bbce4c1f8b65502fd)

![{\displaystyle =[1,2,3...]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/396bb5485dbc1b722977211473b9284a9dab7645)
![{\displaystyle =[...-3,-2,-1,0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4abcd4e73d351f6f226945afda8bb5480b0af26e)
![{\displaystyle =[...-3,-2,-1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e5566bb4b43657b58d72745c1b85913514b0f0f2)


![{\displaystyle [\mathbb {Z} ,+,\cdot ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8072714370978ff03dbdebd140e6df863f384916)